티스토리 뷰

안녕하세요. 정진센터입니다.
이번 프로젝트는 세계적인 항공우주공학자이신 Mark drela 교수님의 Allegro 글라이더를 정확하게 이해하고
정확하게 3D 모델링하여 기체의 특성과 성능에 대해서 생각해보려고 합니다. 그리고 이 기체를 통하여 지금까지 제가 연구한 항공기 설계 방법의 전반에 대해서 정리하려고 합니다.
0. 기체의 특징 정리
AVL 프로그램에 Allegro 기체의 정보가 있어서 해당 정보를 정답으로 생각하고 그 정보를 토대로 기체를 정확하게 모델링해보려고 합니다. 그러나 해당기체가 SI units가 아니라 Imperial units으로 되어 있어서 오차를 최소화하면서 단위를 변환해보도록 하겠습니다.
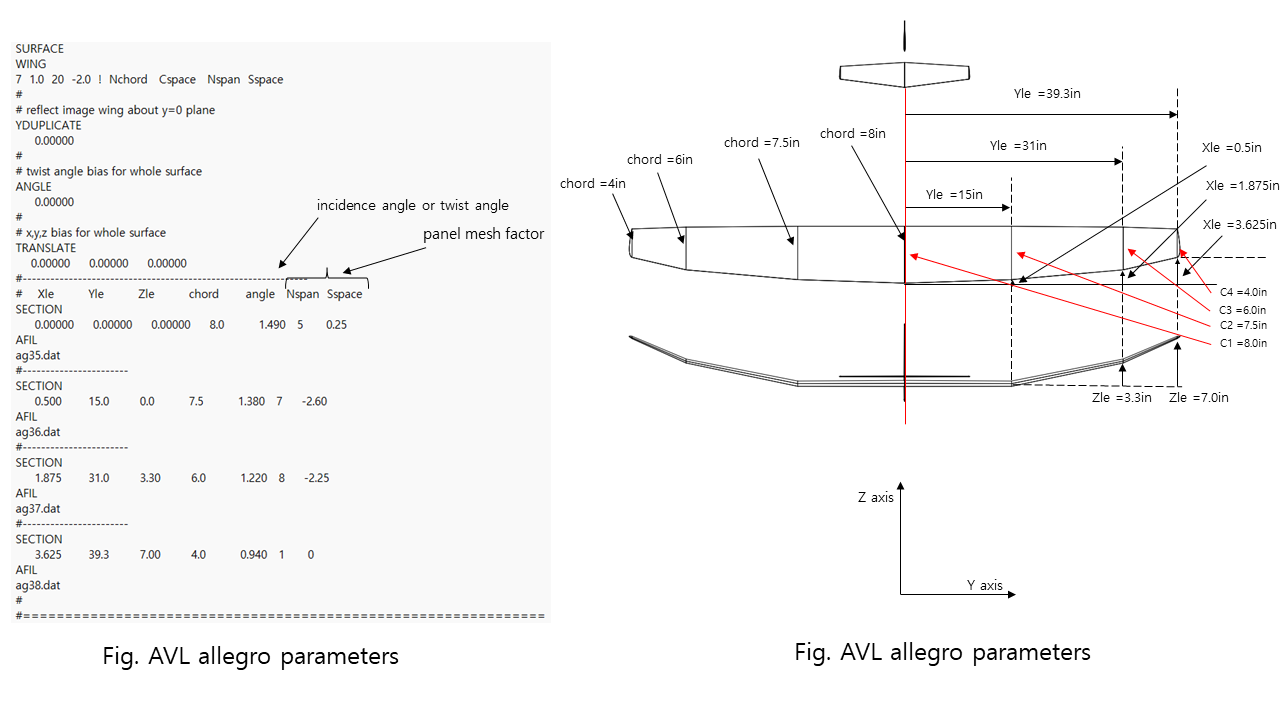
일단 inch로 된 길이 정보를 보기 쉽게 도면상에 표현하였습니다. 이제 inch에서 m로 오차가 적게 변환하려고 합니다.
처음에 길이를 정확하게 파악하지 않으면 나중에 각도 등의 정보가 많이 달라짐으로 정확하게 파악하려고 노력했습니다.
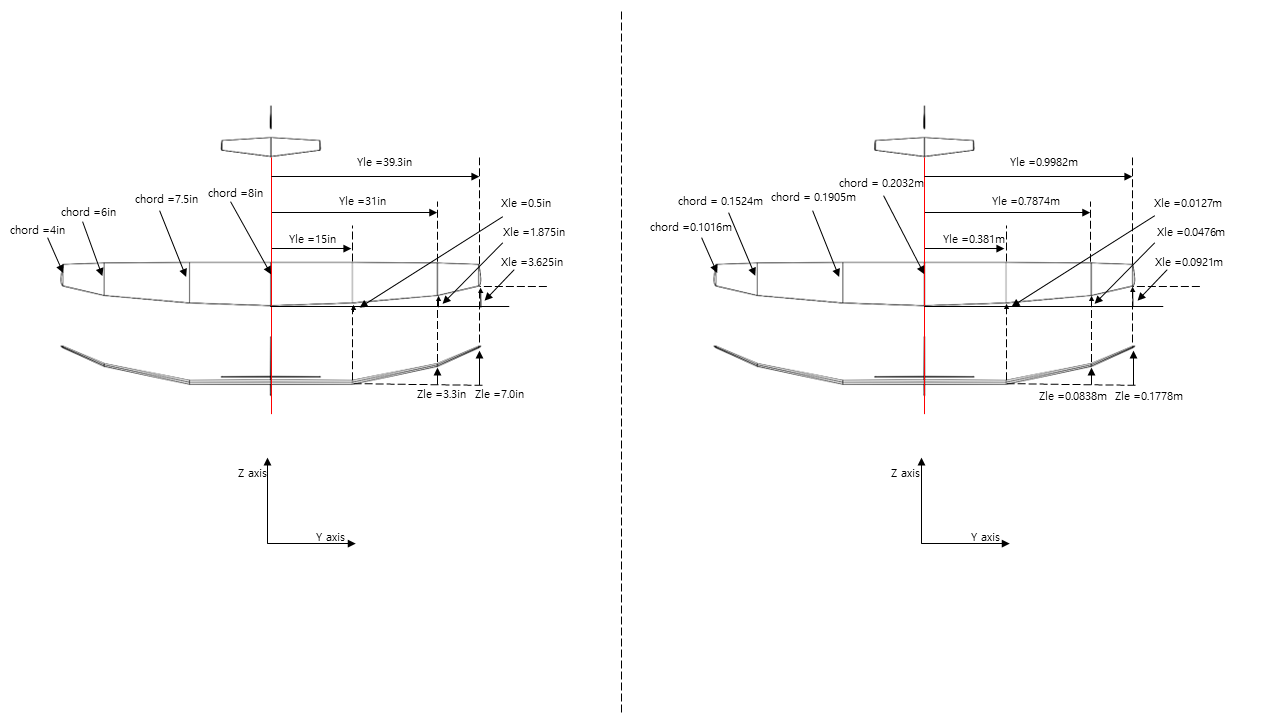
유한 소수점은 소수점 4째자리까지로 하여 각도 변환에서 오차 최소화와 향후 각종 계산 등 작업성을 위해 타협하여 결정하였습니다.
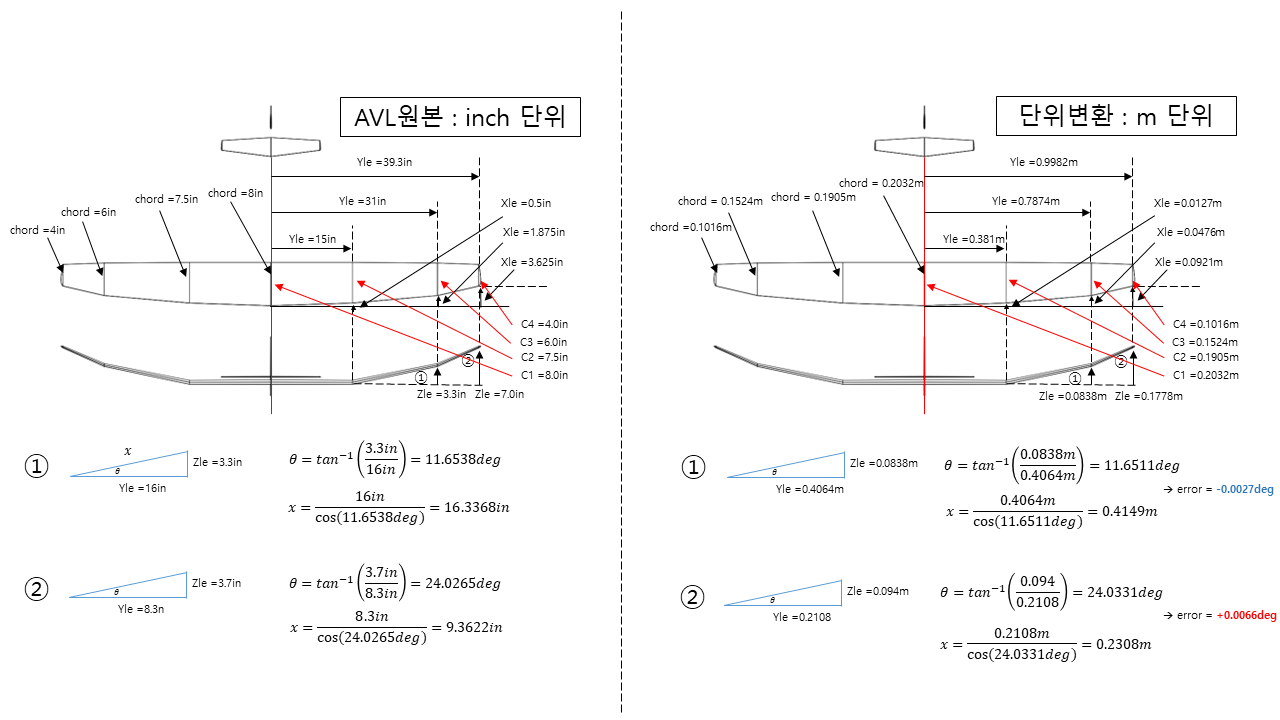
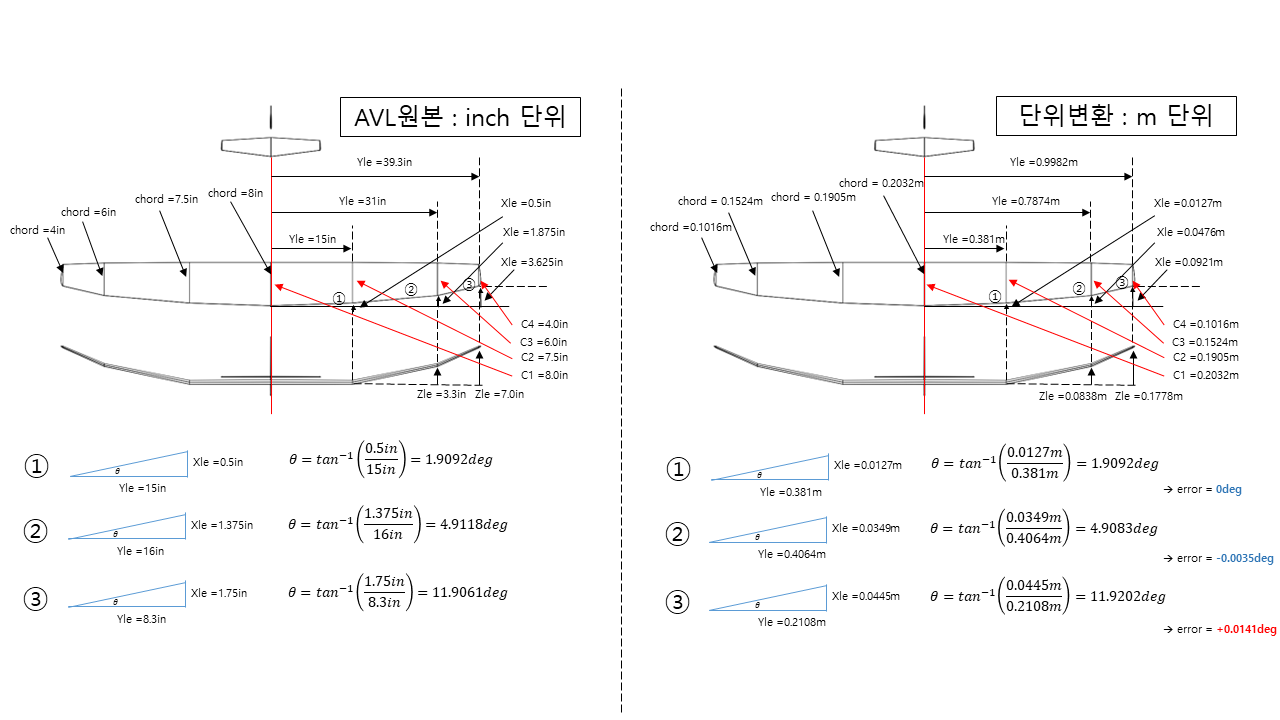
AVL 프로그램의 AVL 파일은 주로 길이차원으로 날개를 표현함으로 상반각(dihedral angle)과 앞전 뒷젓침각(Sweep angle)은 위 Fig.3과 Fig.4의 ①,②와 ①,②,③의 각도는 ∓ 오차를 가집니다. 소수점 3째자리 오차임으로 향후 문제가 될수 있으니 체크만 해놓고 계속 이어가겠습니다.
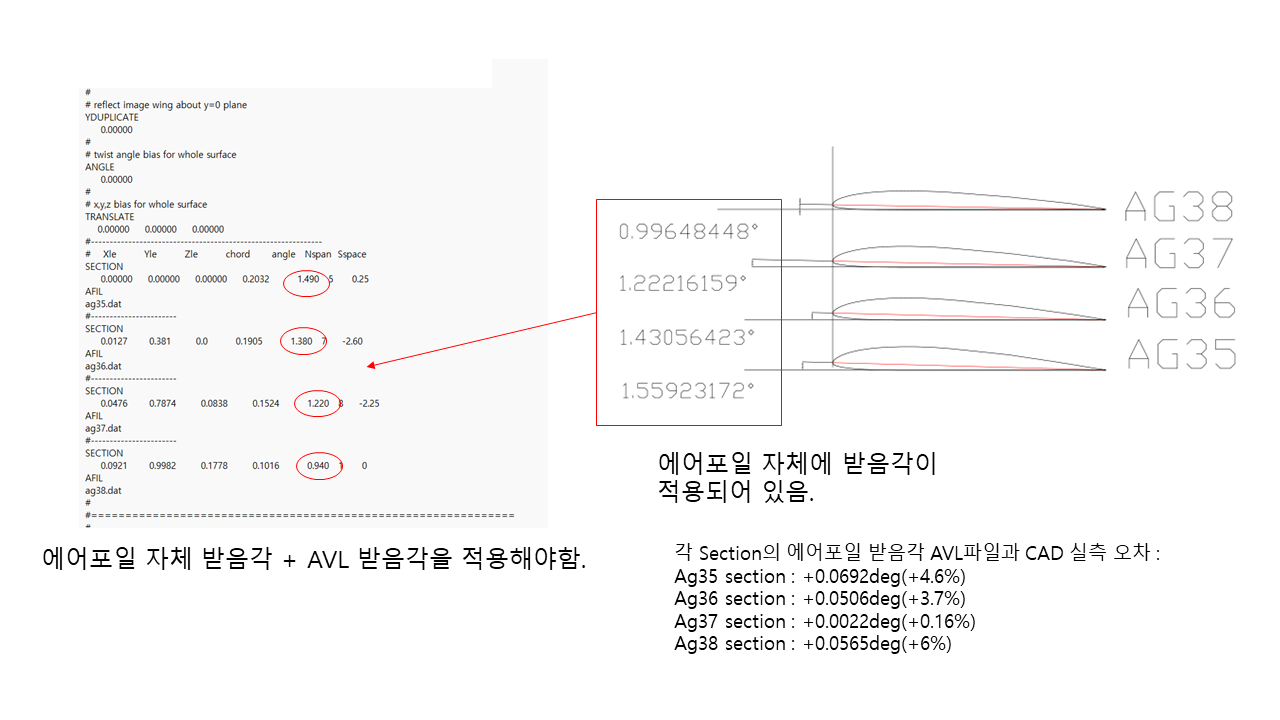
AVL프로그램의 run폴더 안에 allegro의 .avl파일과 에어포일.dat이 포함되어있어서 해당 파일을 그대로 활용하려고 합니다. 그래서 우선 주익에 사용되는 AG35,36,37,38 에어포일을 분석해 보았습니다. 일반적인 airfoil dat파일은 받음각을 0으로 하여 저장하는게 일반적이지만, (물론 안그런것들도 많음) 해당 에어포일은 받음각이 AVL파일의 각 섹션에 맞도록 적용되어 있는것 같았습니다. AVL파일의 섹션 받음각과 AUTOCAD, CATIA 스케치 상에서 비교해보니 0.1~6% 정도 각도 오차가 있음을 확인하였습니다. Allegro가 2000년도 이전에 만들어진 비행기이다 보니 아무래도 오차가 있는것 같습니다. 우선 해당 데이터를 그대로 사용하도록 할 예정입니다.
추가적으로 Fig.5의 왼쪽 Allegro.avl 파일에서 받음각을 왜 입력해주었는지 궁굼했습니다. 왜냐면 오른쪽 에어포일을 보시면 이미 dat파일에 받음각이 적용되어 있는데 avl파일에 추가적으로 작성해두어서 이게 중복으로 각도를 넣어준건가 했는데 angle 값을 0으로 입력하여 그래픽을 확인해보니 camber 라인이 하나도 안보이는 오류가 생겼습니다. 따라서 avl에서는 에어포일에 대한 각도를 별도로 기입해주어야 되는것 같고 정확한 해석을 위해서는 dat파일에도 받음각을 미리 적용하여 입력해야하는 것 같습니다. 저도 정확한 작동원리는 몰라서 이렇게 추정하고 있습니다. 아마도 xfoil해석 데이터를 가지고 와서 3차원 날개에 적용하는 방식인듯 싶습니다.
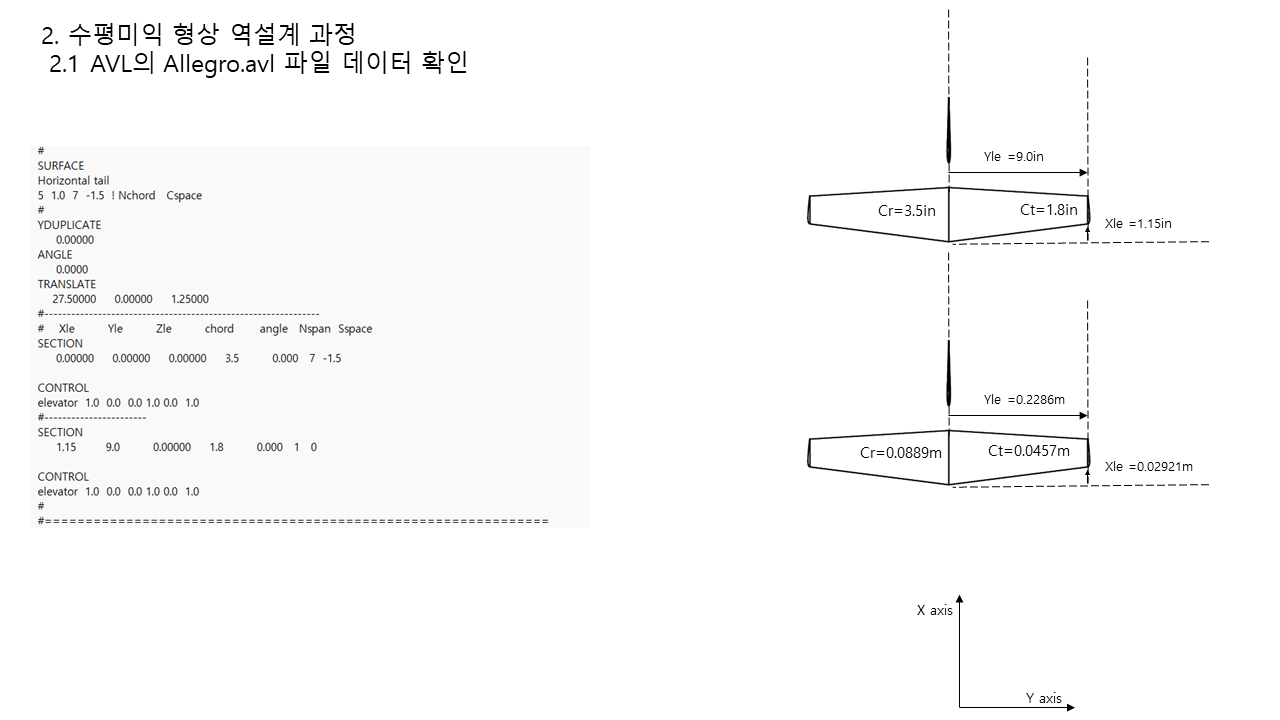
주익과 마찬가지로 유한소수점을 소수점 4째자리까지 하여 변환하였습니다. 사실 4째 자리까지 한이유가 있는데 Openvsp에서 소수점 4째짜리까지 인식하는것 같아서 이렇게 하였습니다. 에어포일은 section에 따라 일정하며 AVL파일에는 나오지 않지만 charlesriverrc.org라는 사이트의 도면을 참고했을때 HT08 5%라는 airfoil을 사용함을 알았습니다. 그리고 수평미익의 위치는 AVL 파일에 있는 x축 27.5in, z축 1.25in임을 확인하였습니다.
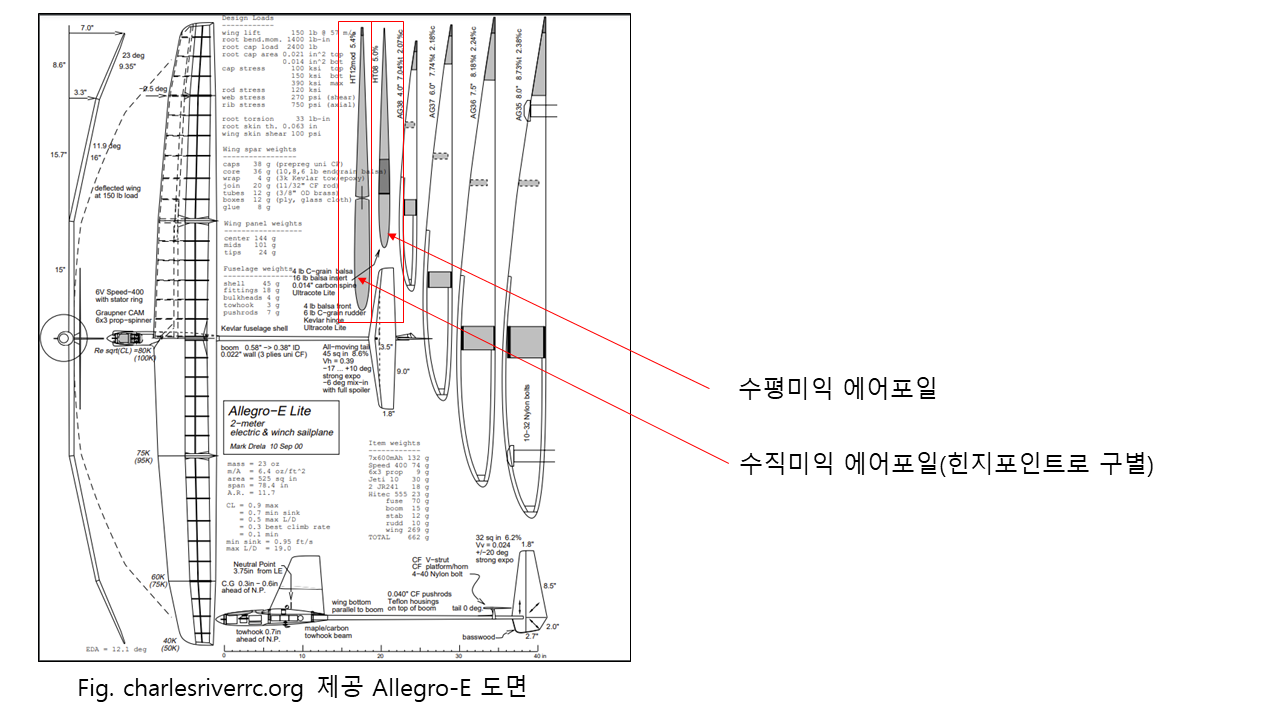
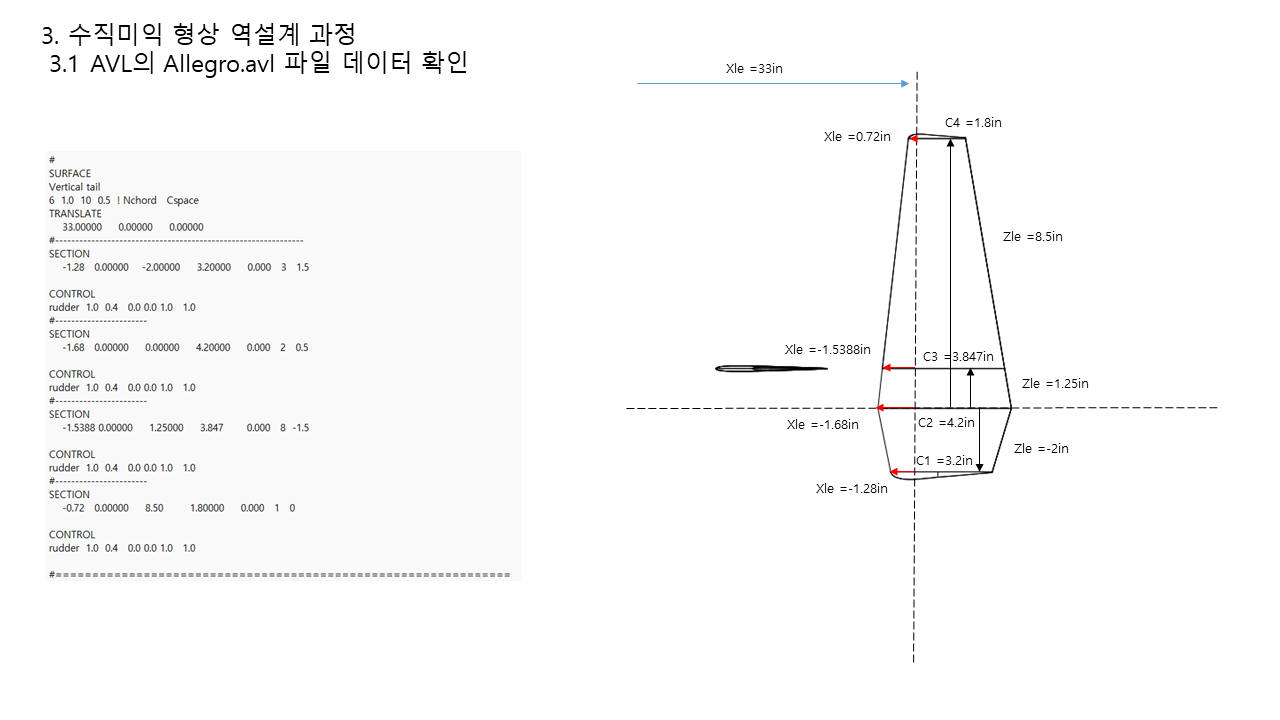
수직미익도 section 별로 일정한 에어포일을 사용한다는 것을 charlesriverrc.org 사이트 도면인 Fig.7 왼쪽 도면을 참조하여 확인하였습니다. 수직미익은 형상이 조금 복잡한데 AVL 파일을 보시면 X축으로 33in 먼저 이동한뒤 section에서 앞으로 당겨표현하였습니다. 그리고 Fig.7 도면을 참고하여 HT12 mod 5.4% 에어포일을 사용한다는 것을 확인하였습니다.
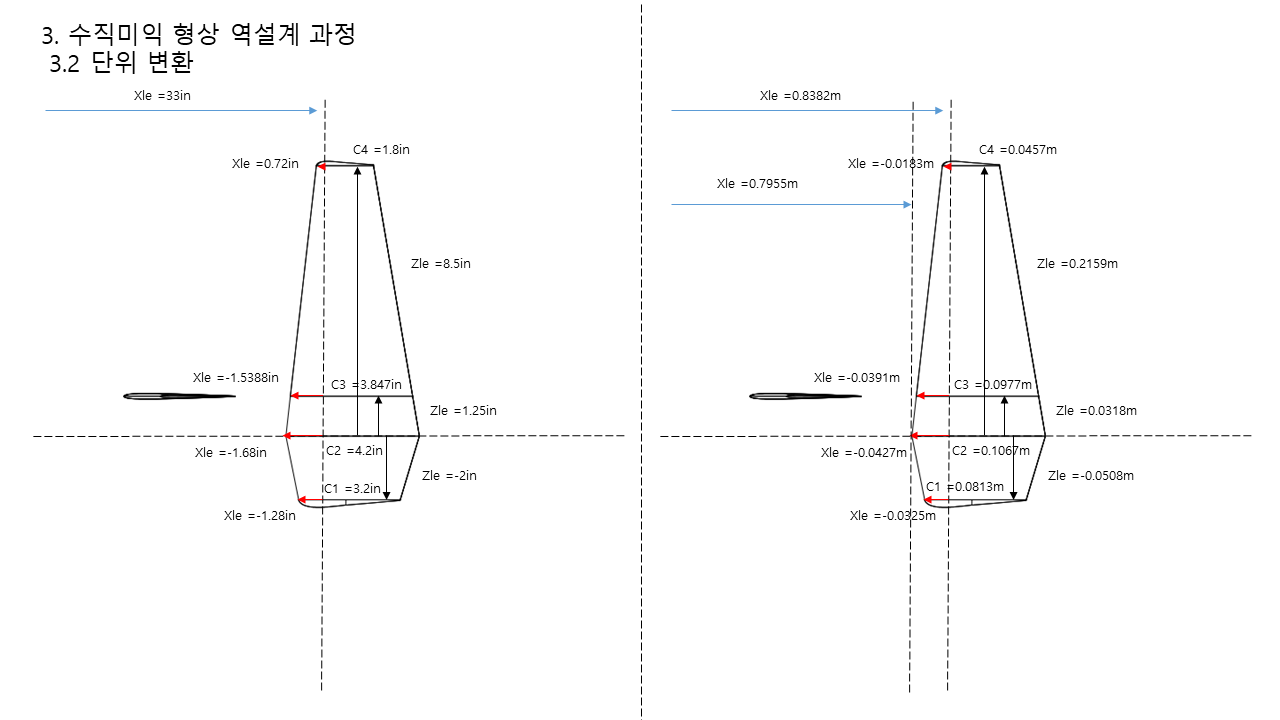
주익, 수평미익과 마찬가지로 유한소수점 4째자리까지 변환하여 표기하였습니다.
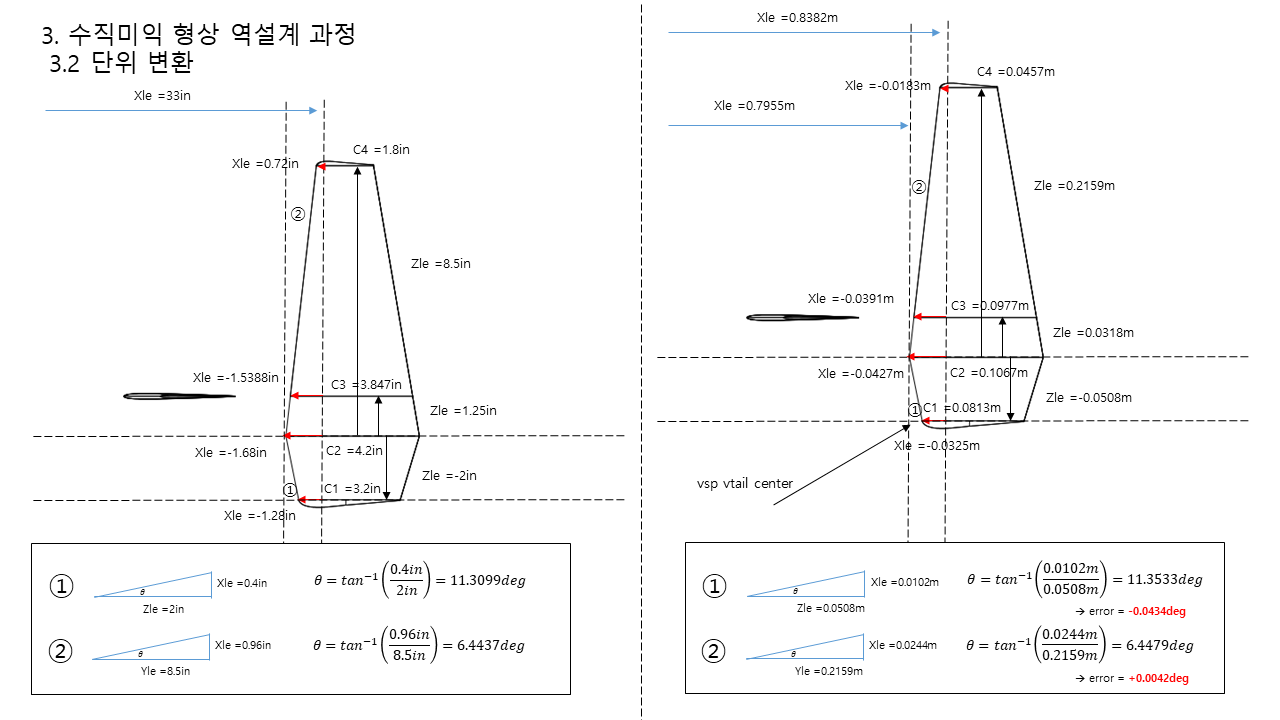
해당 단위변환으로 인해 0.0434, 0.0042deg만큼의 뒷저침각(leading edge sweep angle) 오차가 발생함을 확인하였습니다.
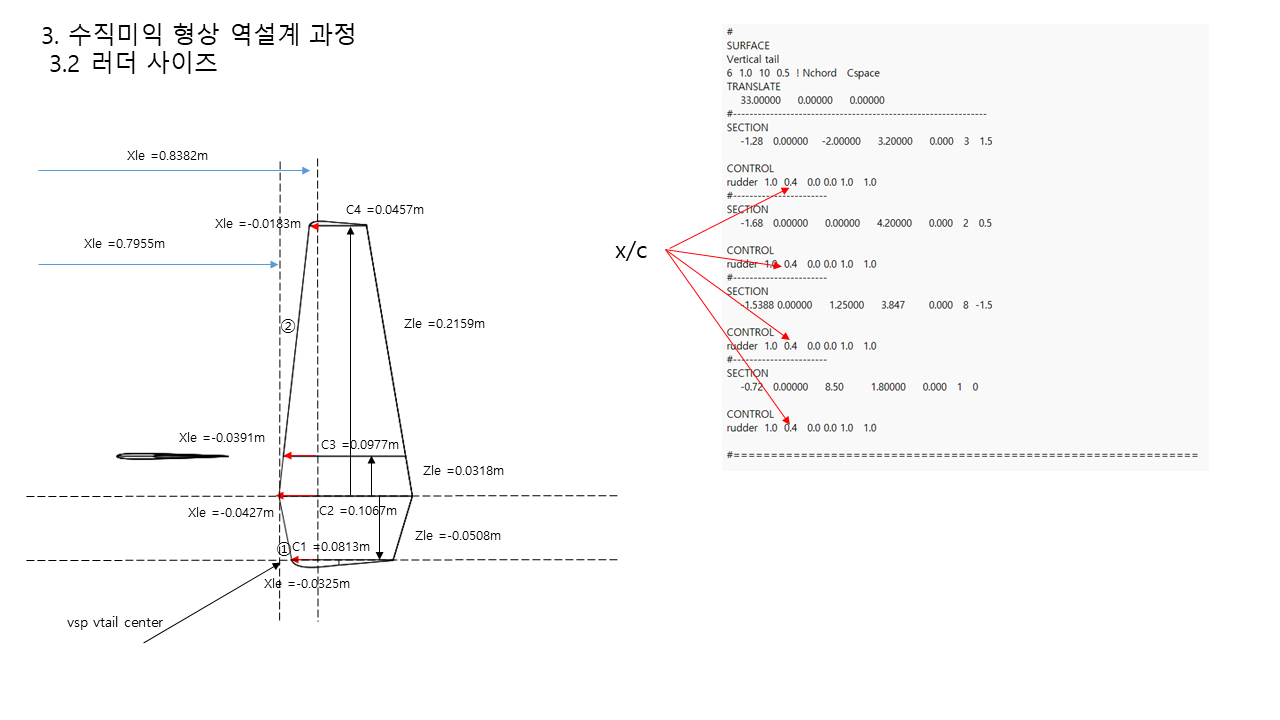
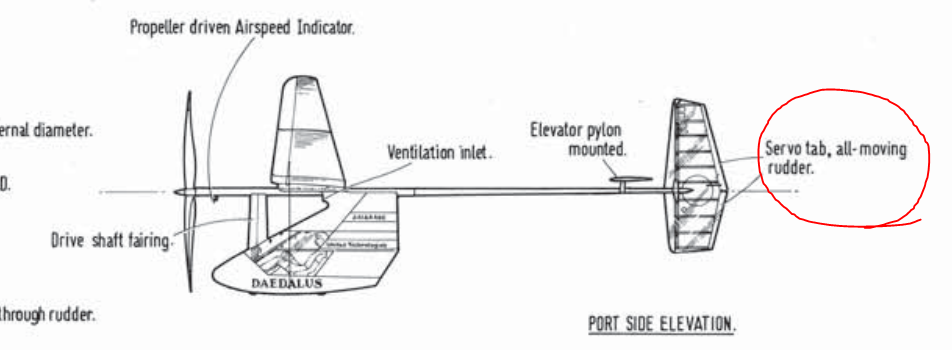
수평미익은 날개 전체가 엘리베이터 역할을 하는 스테빌레이터(Stabilator) 형태였으나 Fig.11의 왼쪽 avl 파일을 보시면 수직미익은 각 section의 leading edge에서 40% 지점에 힌지축이 있음을 알수 있었습니다. 그러면 60%가 러더(Rudder)인건데 보통 30~40정도로 설계하는 것에 비해서 엄청 큰편인것을 알수 있었습니다. 아마도 mark drela 교수님이 인간동력항공기 개발하실때 수직미익도 스테빌레이터로 만드셨던것 처럼 이번 기체에도 적용하고 싶으셨으나 구조 및 제작의 용이하게 하기 위해서 이렇게 하신것 같습니다.
'비행기 설계' 카테고리의 다른 글
| [프로젝트 1-31] 비행기 트림 조건 찾기 2 (0) | 2021.06.20 |
|---|---|
| [프로젝트1-30] openvsp를 이용한 CDF구하기 (5) | 2021.06.20 |
| [프로젝트1-29] 비행기의 트림조건 찾기 (0) | 2020.08.29 |
| [프로젝트1-28] NAVION의 공기력 (0) | 2020.08.22 |
| [프로젝트1-27] 지금까지 구한 계수들 정리 (0) | 2020.08.20 |